Electric vehicles are becoming increasingly popular, with major manufacturers committing to electric and hybrid vehicles. Python is a powerful programming language that can be used to model electric vehicles and their systems, such as charging behaviour and battery performance. This allows for flexible vehicle design and rapid exploratory design of variants. Python's versatility is demonstrated in its ability to simulate electric vehicle charging stations, power and energy demand, and vehicle dynamics. The language also enables the creation of time series data for vehicle mobility, electricity consumption, and grid availability.
| Characteristics | Values |
|---|---|
| Vehicle Design | Object-oriented approach allows for flexibility in vehicle design, enabling rapid exploratory design of variants such as four-wheel drive, independent wheel drive, and multiple electrical sources |
| Validation | Individual objects are validated before the entire vehicle is verified against common drive cycles and real-world test drives |
| Software Schematic | Various objects of the model are independent blocks of code, including abstract base classes that define the linking structure between higher-level classes |
| Wheel Object Verification | Stability and accuracy of the wheel under low acceleration, full power, and increasing brake torque for deceleration are tested |
| Motor Operation | Controlled or regulated by a controller, which serves as the "brain" of the electric vehicle |
| Charging Behavior | PyChargeModel creates classes "ElectricVehicles" and "evse_class" to simulate charging behavior with properties like battery chemistries, pack sizes, cell sizes, and charging port power |
| Charging Station Simulation | Chargym simulates the operation of an electric vehicle charging station, considering random EV arrivals and departures, weather conditions, pricing models, and Battery State of Charge disturbances |
| Routing Problem | Bi-Directional Electric Vehicle Routing Problem (B-EVRP) repository includes code for solving and visualizing optimal charging routes for electric vehicle fleets |
| Power and Energy Demand | EV_sim module simulates power and energy demand during a drive cycle, taking into account speed, acceleration, force, and torque |
| Vehicle Parameters | Vehicle parameters such as desired speed, acceleration, force, and torque are calculated and limited by motor characteristics |
| Battery Voltage | Mathematical models for pack voltage (battery voltage) can be written, and calculations can determine electrode surface area |
| Battery Time Series | emobpy tool can create battery electric vehicle time series: vehicle mobility, driving electricity consumption, grid availability, and grid electricity demand |
Explore related products






What You'll Learn
![]()
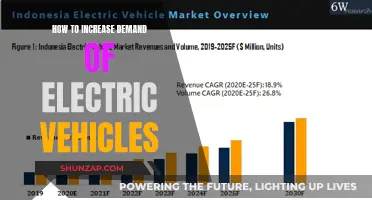
Simulating the power and energy demand of an electric vehicle during its drive cycle
Electric vehicles are becoming increasingly common, with major manufacturers committing to a focus on electric or hybrid vehicles in the future. This has led to a growing interest in modelling electric vehicles using Python, a flexible and powerful programming language. One important aspect of electric vehicle modelling is simulating the power and energy demand during the drive cycle. This simulation helps in understanding the vehicle's performance, range, and energy efficiency.
The simulation of an electric vehicle's power and energy demand involves considering various factors, such as speed, acceleration, force, and torques. The Python package EV_sim, available on GitHub, provides a useful tool for this purpose. It utilizes the methods described by Gillespie and Plett to calculate the demanded motor power at each time step. By taking into account the motor characteristics, the simulation calculates the limited torque, actual forces, acceleration, and speed. This allows for a detailed analysis of the vehicle's performance under different driving conditions.
To set up the simulation, it is recommended to create a Python virtual environment and install the necessary dependencies using the command "pip install -r requirements.txt". The "EV" class object initialization requires defining various vehicle parameters, such as the desired speed, acceleration, and force. Once the simulation is configured, it can be executed using the command "python -m EV_sim" on the command line.
The EV_sim package also enables users to simulate different driving cycles and external conditions. For example, the "DriveCycle" class allows users to specify a particular drive cycle, such as "us06", while the "ExternalConditions" class lets users set parameters like air density and road grade. By varying these conditions, users can analyze the power and energy demand of the electric vehicle under different driving scenarios, contributing to a comprehensive understanding of its performance characteristics.
In addition to the EV_sim package, other Python-based modelling approaches have been proposed. For instance, a case study involving the BMW i3 used MATLAB/Simulink to develop a forward vehicle simulation model, including the powertrain system and longitudinal vehicle dynamics. This model incorporated efficiency maps of the electric motor and inverter, as well as resistance forces opposed to the vehicle's motion. A driver model was also developed to control the vehicle's speed and simulate braking behaviour. These diverse modelling techniques provide valuable insights into the power and energy demand of electric vehicles during their drive cycles.
Is an Electric Vehicle Right for Your Lifestyle?
You may want to see also
Explore related products




$104.16 $150.95


![]()
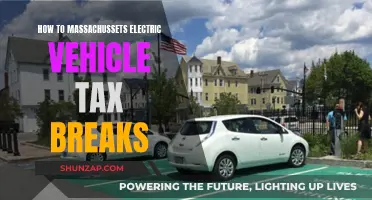
Modelling electric vehicle charging stations
One approach to modelling electric vehicle charging stations is through agent-based modelling (ABM). ABMs simulate the behaviour of individual agents, such as vehicles or charging stations, and their interactions within a system. MESA, an ABM framework for Python, enables users to develop and analyse these models efficiently. In an ABM of a photovoltaic (PV)-powered charging station, the EV agent interacts with the charging control agent (CCA), which communicates with the main control agent (MCA). The MCA coordinates with energy resources, including solar panels, batteries, and the utility grid, to optimise the charging schedule based on factors like State of Charge (SOC) and tariff rates.
Python models can also be used to evaluate the technical, economic, and environmental aspects of charging stations. These models consider different charging systems, such as photovoltaic/grid-charging and photovoltaic/grid/battery-charging setups, along with operational options like energy export to the grid. By simulating load demand and investigating various cases, these models help assess the financial and environmental benefits of charging stations in residential, commercial, or industrial contexts.
Additionally, Python simulations can be employed to study the operation of charging stations under diverse conditions. Chargym, for instance, is a Python environment that simulates EV charging stations by considering random EV arrivals and departures, weather conditions, pricing models, and stochastic Battery State of Charge (BSOC). This enables a deeper understanding of charging/discharging behaviours and facilitates the optimisation of charging station operations.
Furthermore, Python-based models can aid in solving complex problems, such as finding the shortest charging routes for electric vehicle fleets. Using techniques like ant colony optimisation, these models optimise routing and minimise charging time for fleets, contributing to efficient energy management and reduced operational costs. The flexibility of Python allows for the integration of various data sources and algorithms, enhancing the accuracy and practicality of the models.
Comparing Electric Vehicles: What to Consider When Going Green
You may want to see also
Explore related products





![]()
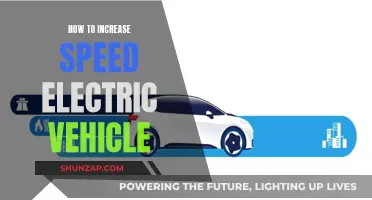
Creating a mathematical model for battery voltage
Python is a great tool for modelling electric vehicles, and one of the key components of an electric vehicle is its battery. Python Battery Mathematical Modelling (PyBaMM) is an open-source battery simulation package written in Python. PyBaMM provides a framework for writing and solving systems of differential equations, which can be used to model battery voltage.
To create a mathematical model for battery voltage, we need to consider the various parameters that affect battery performance, such as battery chemistry, current, temperature, and state of charge. These parameters can be used to develop equations that describe the behaviour of the battery voltage over time.
One approach to modelling battery voltage is to use the Nernst equation, which relates the battery voltage to the electrochemical potential of the battery. The Nernst equation takes into account the number of electrons transferred in the reaction, the gas constant, the temperature, and the concentration of ions in the electrolyte. This equation can be written as:
> V = E° - (RT / nF) * ln(Q)
Where:
- V is the battery voltage
- E° is the standard electrode potential
- R is the gas constant
- T is the temperature in Kelvin
- N is the number of electrons transferred in the reaction
- F is the Faraday constant
- Q is the reaction quotient
By inputting different values for the parameters in this equation, we can model how the battery voltage changes under different conditions.
Another important consideration when modelling battery voltage is the equivalent circuit model. This model represents the battery as a combination of resistors and capacitors, with the voltage across the battery being the sum of the voltages across each component. The equivalent circuit model can be used to calculate the battery voltage dynamically, taking into account factors such as the internal resistance of the battery and the capacitance of the double layer at the electrode interface.
In addition to these theoretical models, PyBaMM also offers a library of battery models and parameters that can be used to simulate battery voltage. These models include the single particle model (SPM) and the Doyle-Fuller-Newman model (DFN), which can be used to simulate various battery chemistries such as lithium-ion and lead-acid. By leveraging these tools and equations, a comprehensive mathematical model for battery voltage in electric vehicles can be developed and simulated in Python.
Lease Electric Vehicles: Extremely Cheap Options Explained
You may want to see also
Explore related products





![]()
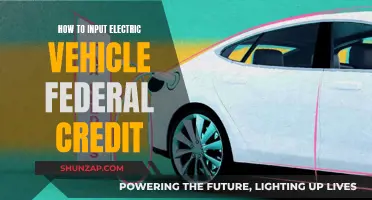
Vehicle dynamics simulation
One approach to EV dynamics simulation in Python is using the EV_sim module, which facilitates the modelling of EV power and energy demand during its drive cycle. This simulation requires various vehicle parameters as inputs, including desired speed, acceleration, force, and torques. By considering the limitations of motor characteristics, the simulation calculates the limited torque, actual forces, acceleration, and speed. This method, described by Gillespie and Plett, provides valuable insights into the EV's performance characteristics.
Another Python-based simulation framework is HELVES, which focuses on modelling the dynamic behaviour of EVs on highways. It assesses the impact of different EV and charging station parameters, such as penetration levels, allocation strategies, charging rates, and capacities. HELVES employs Key Performance Indicators to illustrate charging times and helps evaluate the burden on the power system due to the increasing adoption of electric mobility.
For a more detailed EV model, an object-oriented programming approach using Python 3 offers flexibility in vehicle design. This method involves defining key parameters to specify the vehicle, such as the Nissan Leaf in the provided example. Each component of the model, such as the wheel, is individually validated through testing. This ensures stability, accuracy, and performance evaluation under different conditions, including acceleration, braking, and power variations.
Additionally, Python can be used to simulate the operation of EV charging stations. Chargym, for instance, considers random EV arrivals and departures, weather conditions, pricing models, and battery states to provide a comprehensive understanding of charging station dynamics. These simulations are essential for optimizing charging station operations and managing the power distribution for a growing number of EVs.
Claiming Electric Vehicle Tax Credits: TurboTax Guide
You may want to see also
Explore related products






![]()
Electric vehicle modelling with Python programming language
Electric vehicle (EV) modelling with Python programming has become increasingly important as major vehicle manufacturers shift their focus to electric and hybrid vehicles. Python can be used to create a flexible and adaptable EV model, allowing for rapid exploratory design of vehicle variants.
Python's object-oriented programming approach enables the creation of independent blocks of code, each representing a specific component of the EV model. This modular design simplifies the process of modifying vehicle configurations, such as transitioning between four-wheel drive and independent wheel drive. The model can be validated through comprehensive testing, including real-world drive tests, to ensure the accuracy and stability of the vehicle's performance.
Python tools like PyChargeModel facilitate EV modelling by creating classes for "ElectricVehicles" and "evse_class", enabling the simulation of charging behaviour. These classes can be instantiated with properties like battery chemistries, pack sizes, and charging port power. The PyChargeModel also allows communication between objects, facilitating interactions during the charging process.
Additionally, Python's EV_sim module provides a database of commercial electric vehicles, along with relevant parameters. This module assists in simulating the power and energy demand of an EV during its drive cycle, taking into account factors such as speed, acceleration, force, and torque. The simulation calculates the demanded motor power at each time step, considering the limitations of motor characteristics.
Furthermore, Python tools like emobpy can create battery electric vehicle time series, including vehicle mobility, driving electricity consumption, grid availability, and grid electricity demand. This tool considers factors such as ambient temperature, traction effort, and driving cycles to simulate travel conditions accurately. With Python's versatile tools and modules, electric vehicle modelling becomes a dynamic and adaptable process, contributing to the advancement of electric vehicle technology.
Driving Electric Vehicles: A Beginner's Guide to Getting Started
You may want to see also
Frequently asked questions
Electric vehicle modelling is the process of creating a digital representation of an electric vehicle using programming languages like Python. This allows for the simulation and testing of various vehicle parameters, such as power, energy demand, charging behaviour, and vehicle design.
You can use the Python source code provided in the GitHub repository "EV_sim" to simulate the power and energy demand of an electric vehicle. This simulation takes into account various vehicle parameters such as speed, acceleration, force, and torque.
You can use tools such as PyChargeModel, a Python-based software, to model the charging behaviour of electric vehicles. PyChargeModel creates two classes, "ElectricVehicles" and "evse_class", which can be used to simulate charging behaviour by assigning various properties such as battery chemistries, battery pack sizes, and charging port power.
Electric vehicle modelling in Python has various applications, including:
- Simulating the operation of electric vehicle charging stations, considering random EV arrivals and departures, weather conditions, pricing models, and battery states.
- Creating battery electric vehicle time series, including vehicle mobility, driving electricity consumption, grid availability, and grid electricity demand.
- Modelling vehicle dynamics, such as wheel stability, accuracy, and brake torque, to test vehicle performance under different conditions.